Negative Feedback
One of the most important discoveries of the computer age was negative feedback in control and guidance systems. The basic pattern was present in servomechanisms or governors of steam engines in the early 1800s. However, guided missiles showed the true power of these concepts.
When machines started to show "intelligent" behavior, such as guiding themselves toward a target, scientists realized the same general principles could be applied to a wide variety of controlled behavior in organic and inorganic systems. The word cybernetics was invented by Norbert Weiner (1948) for the science of control systems in machines and organisms.
Negative feedback does not mean criticism in the context of cybernetics. The original cybernetic meaning of negative feedback is deviation-reducing feedback: feedback designed to move a system toward a goal.
In a negative feedback system, information is fed back from sensors (devices capable of sensing the current state of the system) to effectors (things capable of making an effect or altering the behavior of the system). The system is designed in such a way as to use information from the sensors to activate the effectors and reduce the distance (deviation) between the present state of the system and the goal state.
A guided missile works by using sensors to detect the goal, such as heat produced by a jet engine. The tip of a heat-seeking missile contains heat-sensing elements.
Three sensors in a triangular array are enough to determine the direction of a heat source. That information is relayed back (fed back) to the steering mechanism.
The steering system adjusts the propulsion mechanism to move the missile toward the location of heat. The whole system is designed to progressively reduce the distance between the missile and its goal.
All goal-pursuing systems use negative feedback. The goal may be to maintain a dynamic equilibrium, such as a temperature of 75 degrees Fahrenheit in a house. In that case, the system works as necessary to reduce any distance between the present state (the temperature in the room) and the goal state (the temperature set on the thermostat).
As the temperature inside a house changes, the thermostat sends a signal to a relay, turning on effectors (heating or cooling elements and a fan). When the temperature reaches the goal state defined by the setting in the thermostat, the system rests (perhaps keeping the blower on to circulate air).
Consider a totally different example: graduating with a degree. The goal is graduation. To reach this goal, a student must overcome obstacles called graduation requirements.
Each unfulfilled requirement is a gap or deviation from the goal of graduation. Once these obstacles are eliminated, the goal is attained, and a degree is received.
The principle of deviation-reducing (negative) feedback: All goal-directed activity, whether directed toward restoring an equilibrium state or reaching a target in the future, depends on negative (deviation-reducing) feedback.
An early example of negative feedback comes from the governor of a steam engine. A governor is a device that keeps an engine at a constant speed (a dynamic equilibrium) regardless of the load on the engine.
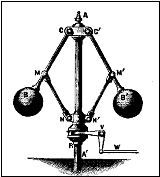
The fly-ball governor was designed to keep a steam engine spinning at a steady rate.
James Watt, inventor of the steam engine, came up with the control system called a fly-ball governor. The mechanism involved a spinning set of weights as shown here.
The faster the steam engine went, the faster the weights were spun. Centrifugal force would lift them higher, then a linkage to a valve reduced steam pressure to the engine as the weights were lifted.
If the engine slowed down, the spinning weights dropped, allowing more steam pressure to the engine. The goal was to maintain a steady speed. Any device called a regulator has a similar effect: keeping some quantity that varies (a variable) within a desired range.
A cruise control performs this function in modern cars. It gives the engine more energy when the car goes up a hill, less energy going down a hill. That keeps the speed relatively constant.
In order to accomplish this, the system must have classic elements of a negative feedback system. A sensor detects the speed of the car. This information is fed back to the accelerator system, adjusting the engine (an effector) to maintain a steady speed.
Whether the pattern is in a physical system, like the governor of a steam engine, or in the body, like processes that maintain oxygen and glucose in the body, or written into the program of a computer, the basic pattern of negative feedback is the same. To pursue a goal, one must identify it, know how to get there, and then reduce the difference between the current state of the system and the goal state.
This always requires sensors (some way of sensing the goal state), feedback arrangements (so information from the sensors can affect the rest of the system) and effectors (elements of the system that make a change in response to the information). When organized correctly, the result is deviation-reducing feedback.
This pattern of organization is always involved in systems that behave purposefully. Negative feedback is basically an analysis of what it means to say a system pursues a goal.
The TOTE unit
Miller, Galanter and Pribram (1960) were some of the first to highlight the relevance of cybernetics to psychology. They did so in a book titled, Plans and the Structure of Behavior.
In their book, Miller, Galanter and Pribram described a simple procedure for accomplishing goal-directed behavior: the TOTE unit. They used the example of pounding a nail.
- The system tests to see if the nail is sticking up.
- If the result of step 1 indicates the need for an action, the system performs an appropriate operation: it hits the nail with a hammer. This operation is the "O" in TOTE.
- Now the system returns to step 1 and repeats the test.
- When the nail is no longer sticking up, the system moves on. It might exit the whole nail-pounding subroutine, or it might exit the area of that one nail and move to the next.
The TOTE unit can be diagrammed in a simple flow chart.
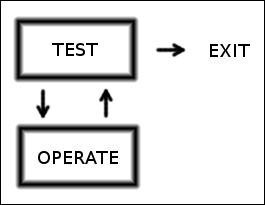
TOTE stands for Test, Operate, Test, Exit.
This is network representation. There are nodes and relationships. The relationships indicate control or influence, so the diagram shows a simple control system.
The diagram is highly schematic. To make it functional, like a real algorithm (a fully specified set of procedures for accomplishing a task) one would have to add much more information, such as the order of the tasks, the nature of the test, and the exact types of operations.
Norbert Weiner realized that all systems, animate or inanimate, had to use control systems if they showed goal-directed behavior. That inspired his 1948 proposal for a new science he called cybernetics, in the book Cybernetics: Or Control and Communication in the Animal and the Machine.
In 1948, computers were just getting started. They were regarded as a shining example of what might be possible using cybernetics. Today, we use cybernetics every day by using computers and other forms of information processing.
People now refer to computing or information processing more often than cybernetics. However, cybernetics remains an academic specialty for those interested specifically in control systems, explored in journals like Cybernetics and Systems.
---------------------
References:
Miller, G. A., Galanter, E., & Pribram, K. H. (1960) Plans and the structure of behavior. New York: Holt.
Weiner, N. (1948) Cybernetics: Or Control and Communication in the Animal and the Machine. Cambridge, MA: MIT Press.
Write to Dr. Dewey at psywww@gmail.com.
Search Psych Web including the General Systems Toolkit and the online textbook Psychology: An Introduction below.
Copyright © 2017 Russ Dewey